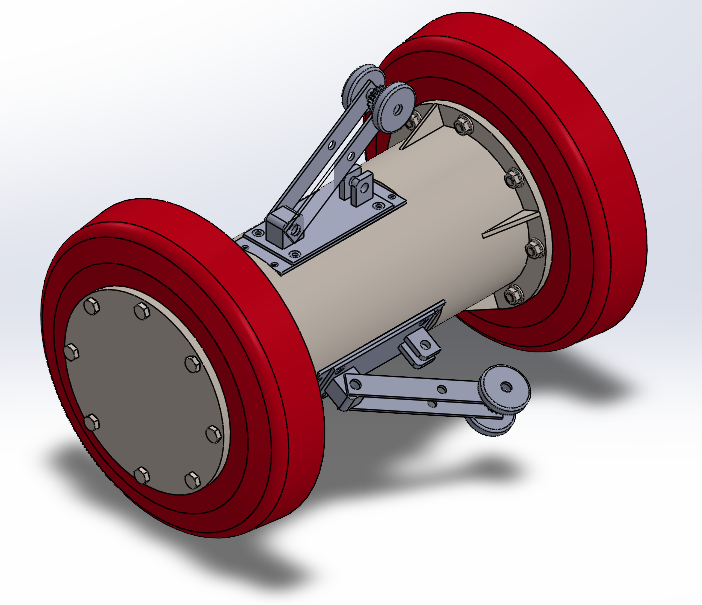
为了解决长距离油气输送管道存在的诸如管道变形、开裂等安全问题,常采用压差式管道检测器进行检测。在高压、高速介质的管道内,现有的内检测器在高速流动的气流中难以保持速度的快速稳定,大大影响了检测精度。此外,检测器在复杂的管道环境内出现卡死或停滞的风险较高。
针对现有油气管道内检测器运动控制技术的缺点,进行内检测器运动速度和姿态控制算法的研究,并设计出一种基于驱动皮碗三阀门开口耦合控制的内检测器运动速度控制方法,实现管道内检测器的速度控制和姿态控制,实现内检测器在管道内运动时的智能调整,避免卡堵或停滞的情况,对于提升内检测器在管道内的检测精度也有重要的意义。